Inhabit
Phone video → metric 3D reconstruction → a room a robot can explore.

The full pipeline in one shot: phone capture → metric 3D reconstruction → a Go2 robot exploring the scanned room at metric scale.

Fidelity check on a benchmarked scene (Replica room0): original video (left) and our reconstruction (right), along the same path. Sub-centimetre accuracy against the ground-truth mesh.
Interactive viewers (live)
4 methods + consensus
PGSR · DN-Splatter · MonoSDF · the consensus fusion, aligned in one frame. Toggle to compare.
Open viewer →Reconstruction vs ground truth
Our reconstruction toggled against the Replica ground-truth mesh (Chamfer 0.62 cm).
Open viewer →Quality vs ground truth (Replica, visibility-culled · cm / F-score@5cm)
| Method | Accuracy ↓ | Completion ↓ | Chamfer-L1 ↓ | F-score ↑ |
|---|---|---|---|---|
| PGSR | 1.13 | 7.60 | 4.37 | 0.898 |
| DN-Splatter | 0.57 | 6.14 | 3.36 | 0.936 |
| Consensus (ours) | 1.07 | 6.47 | 3.77 | 0.913 |
5-scene average. Sub-centimetre accuracy. Full protocol + per-scene table in the repo's docs/BENCHMARK.md.
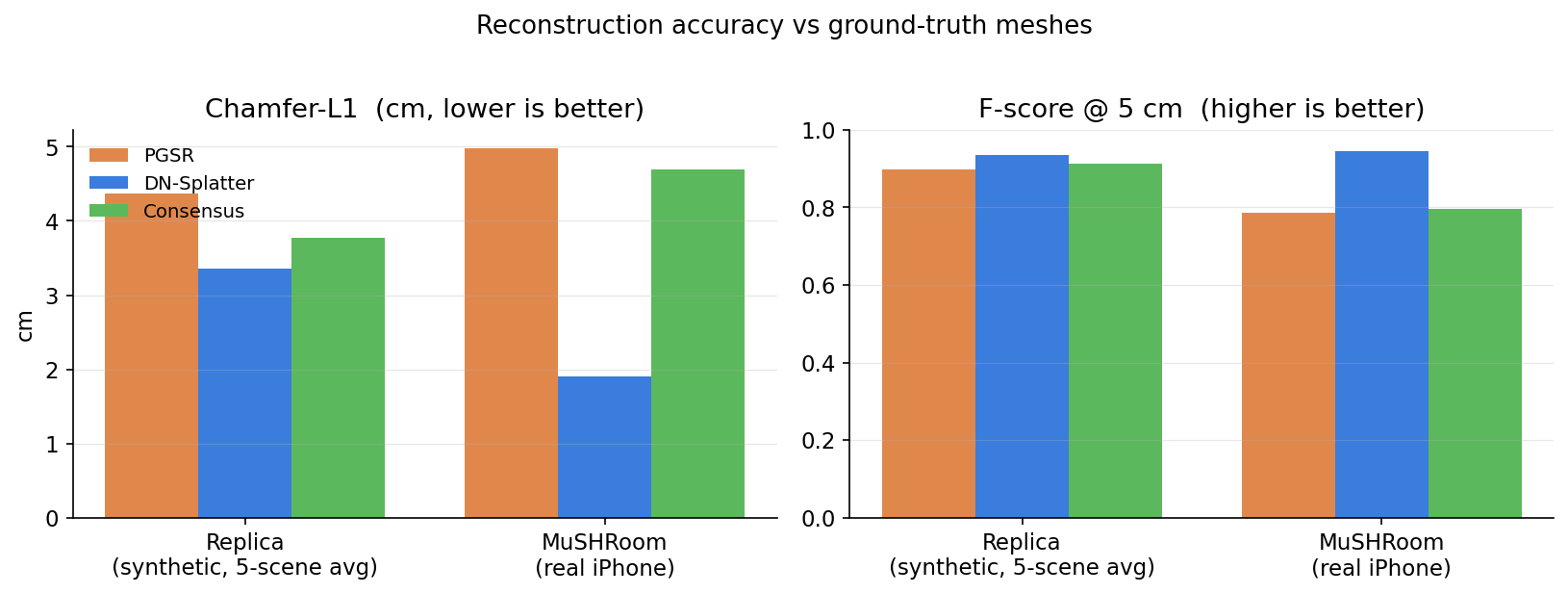
Chamfer-L1 (lower is better) and F-score@5cm (higher is better) across the three methods, on the Replica average and on a real iPhone capture.

All five benchmark scenes, input video (left) vs reconstruction (right) along the same path. Top: room0, room1, room2; bottom: office0, office1.
And on a real iPhone capture

A real handheld iPhone scan (MuSHRoom coffee_room), reconstructed and validated at roughly 2 cm against a Faro laser ground-truth mesh. Rougher than the rendered scenes, as expected for real capture.
A robot moves through it, at metric scale
A Go2 quadruped traverses the phone-scanned room in Genesis at metric scale (fixed camera, planned path with a trot gait; a kinematic traversal, since physics-driven locomotion needs a trained policy). Rigid-body physics is validated separately: a dropped object rests on the floor within 2 cm. See scripts/genesis/ and docs/PHASE2_GENESIS.md.
Why this matters
Reconstruction is the front half of the loop; the back half is what the metric mesh is for. Because the output is metric and loads as a rigid-body collider, every capture becomes an environment an agent can be trained and tested in. Paired with a physics engine like Genesis, a phone becomes an environment generator.
- Training data at scale. Each scan is a sim-ready environment. Domain-randomise it and render egocentric trajectories to produce labelled embodied data, with no capture rig and no manual scene authoring.
- Evaluation in diverse, real environments. A new test scene is just a phone recording: kitchens, stairwells, cluttered offices, the long tail of real rooms instead of a few hand-built ones.
- Real-to-sim from data you already have. Egocentric and teleoperation footage becomes simulatable RL environments, so policies can be re-tested against the exact out-of-distribution situations the fleet met in the real world.
Code
Repo & full write-up on GitHub — see the repo, docs/ARCHITECTURE.md, and docs/BENCHMARK.md.